



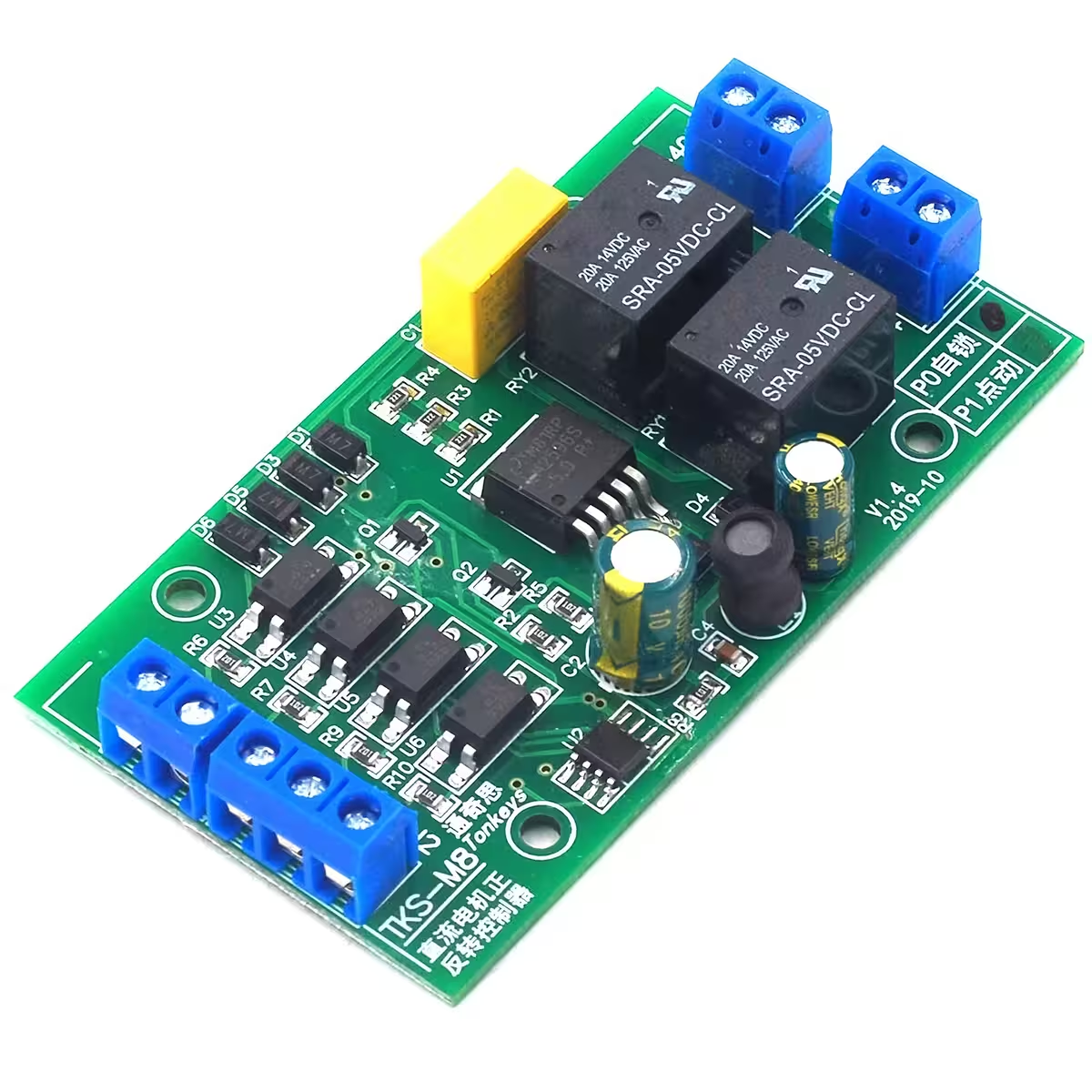
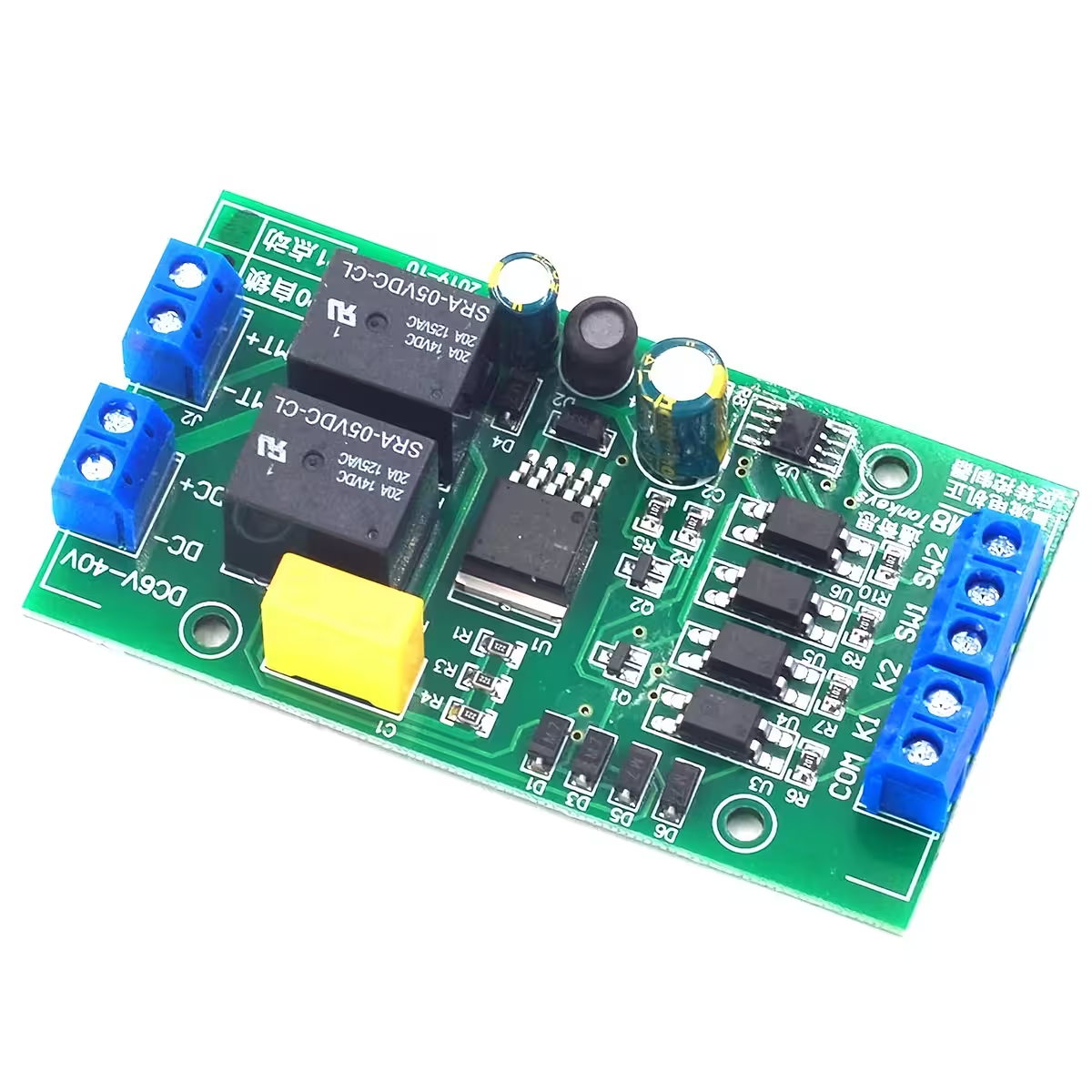
DC-mootori suunajuhtimise kontroller – edasi-tagasi liikumine ilma lisakomponentideta
Kas ehitad lineaarajamit, pööratavat mehhanismi või vajad oma DIY-projektis täpset mootori suunajuhtimist? Ilma spetsiaalse moodulita tähendaks see keerulist releede, transistorite ja juhtmete rägastikku. See DC-mootori kontroller lahendab kõik ühe kompaktse mooduliga: ühenda toide, mootor ja nupud ning süsteem on mõne minutiga töövalmis.
Märkus: Mootor saab sama pinge, mis on toiteallikal. Pinge ei ole selle kontrolleriga reguleeritav.
Miks valida just see mudel? (Peamised eelised):
- Lai pingevahemik: 4–40V DC — töötab nii LiPo-akude, laboritoiteplokkide kui ka tööstuslike toiteallikatega ilma muudatusteta.
- Väljundvool kuni 20A — saab hakkama suurte käivitusvooludega mootoritega, sobib kuni ~80W koormustele.
- Kaks valitavat režiimi: PO ja P1 — vali isehoidva režiimi (lühike impulss käivitab) ja jog-režiimi (töötab vaid nupu allhoidmisel) vahel.
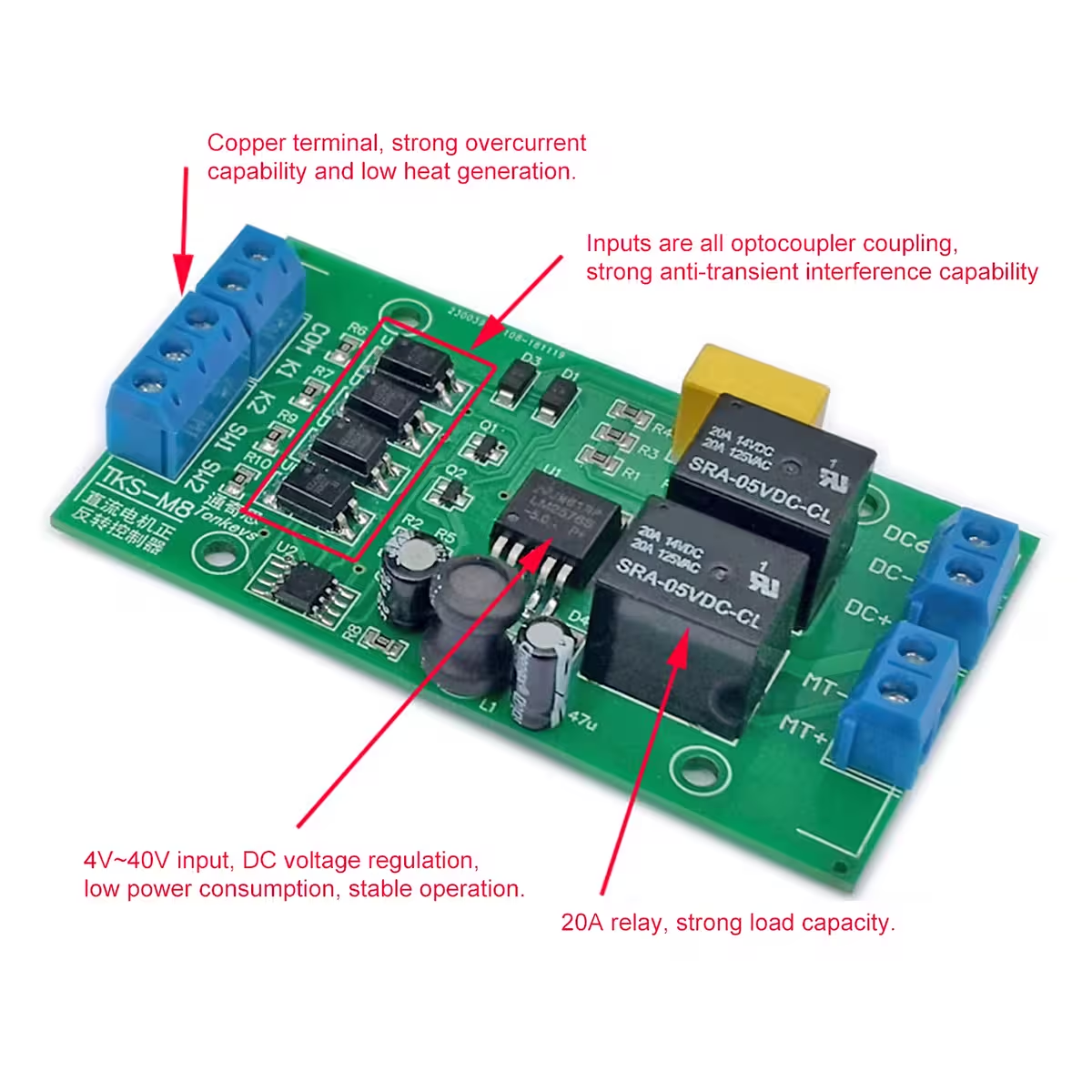
- Universaalsed active-low sisendid — ühenda otse lihtsad nupud, NO-tüüpi mehaanilised piirlülitid või 3-juhtmelised NPN-andurid ilma lisatakistite või loogikata.
- Integreeritud SW1/SW2 piirlülitid — automaatne seiskamine liikumistee lõpus välistab mehaanilise blokeerumise või ülekoormuse ohu.
- Pikk eluiga >150 000 tsüklit — töökindlus igapäevaseks intensiivseks kasutamiseks.
- Madal omatarve: 0,6W aktiivne / 0,1W ooterežiim — ei kurna akut, kui süsteem on ootel.
Tehnilised andmed ja jõudlus
Kontroller kasutab active-low sisendite arhitektuuri: sisend aktiveerub, kui pinge langeb alla 2V. See tähendab, et tavalised nupud, NO (normal-open) piirlülitid ja NPN-NO 3-juhtmelised andurid ühilduvad otse ilma vahelülideta.
Reageerimisaeg on ≈20ms K1/K2 käskude puhul ja ≈50ms SW1/SW2 piirlülitite puhul — piisavalt kiire dünaamiliste rakenduste jaoks ja piisavalt stabiilne valelülituste vältimiseks.
Kõrgemate pingete puhul on soovitatav voolutugevust piirata: 12V juures on lubatud kuni 20A, kuid 24V juures on pikaajalise termilise stabiilsuse tagamiseks soovitatav piirata voolu ~10A-ni. Kasuta alati sobiva nimivooluga kaitset ja koormusele vastava ristlõikega kaableid.
| Parameeter | Väärtus / Kirjeldus |
|---|---|
| Tööpinge | DC 4–40V (soovitatav 6–36V) |
| Maksimaalne väljundvool | kuni 20A (12V juures) |
| Soovitatav mootori võimsus | kuni ~80W |
| Mooduli tarve (aktiivne) | u 0,6W |
| Mooduli tarve (ooterežiim) | u 0,1W |
| Sisendsignaali tüüp | Active-low (aktiveerub pingel < 2V) |
| K1/K2 reageerimisaeg | ≈ 20ms |
| SW1/SW2 reageerimisaeg | ≈ 50ms |
| Töörežiimid | PO (isehoidmine) / P1 (jog) |
| Eluiga | >150 000 tsüklit |
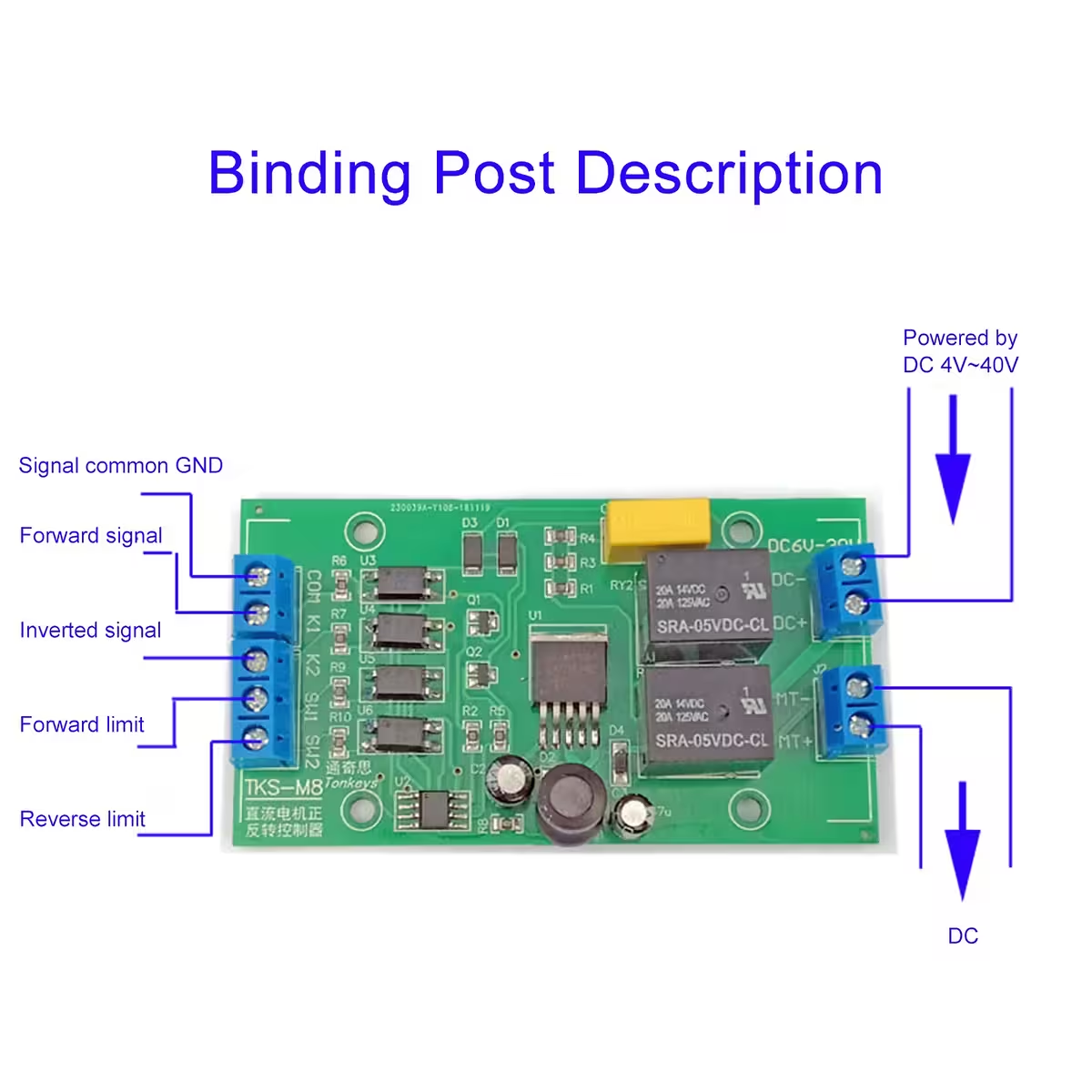
| K1 sisend | Edasikäigu käsk (active-low) |
| K2 sisend | Tagasikäigu käsk (active-low) |
| SW1 | Edasikäigu piirlüliti (soovitatav NO) |
| SW2 | Tagasikäigu piirlüliti (soovitatav NO) |
| VIN+ / VIN- | Mooduli toide DC 4–40V |
| Motor+ / Motor- | Väljund DC-mootorile |
Programmeerimine ja kasutamine
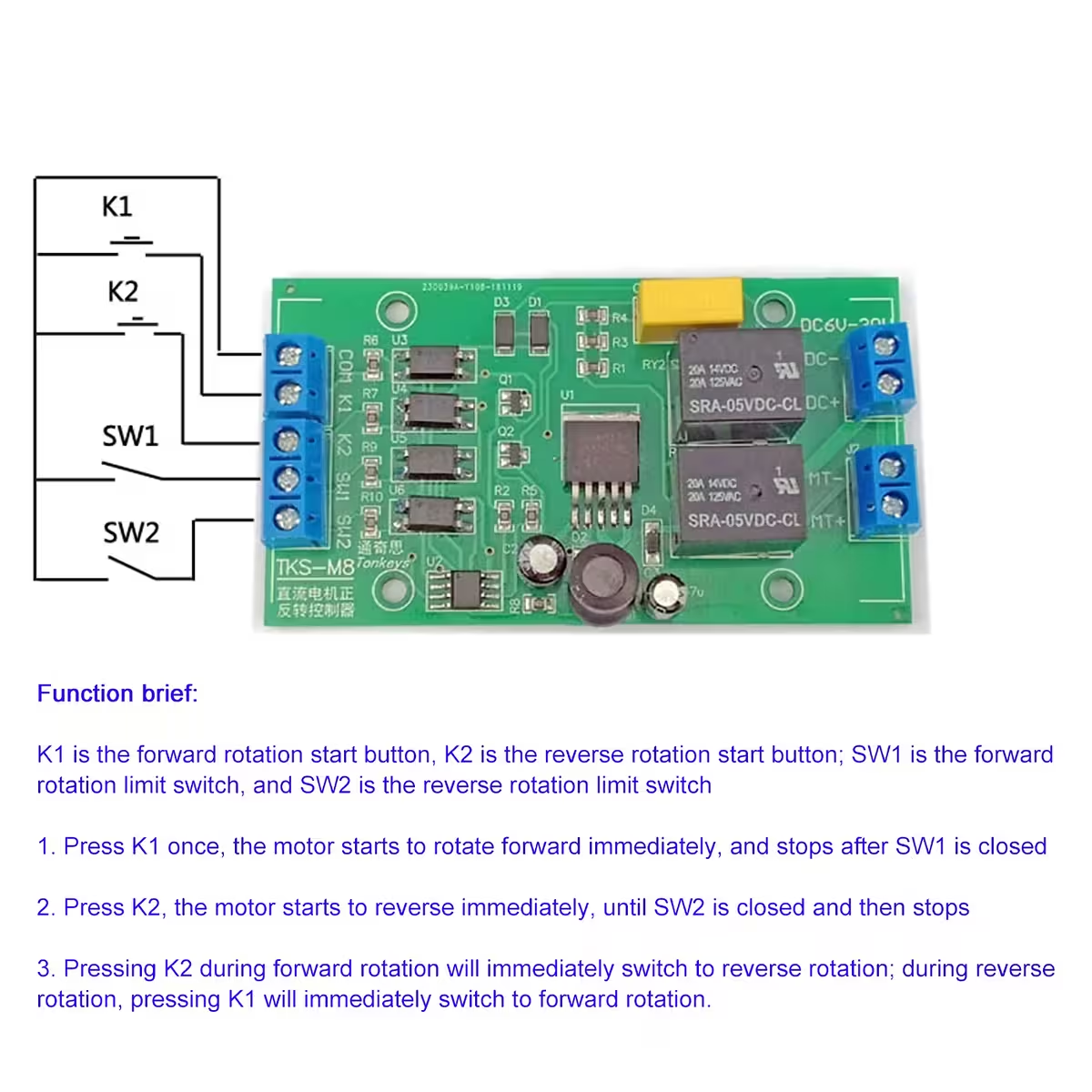
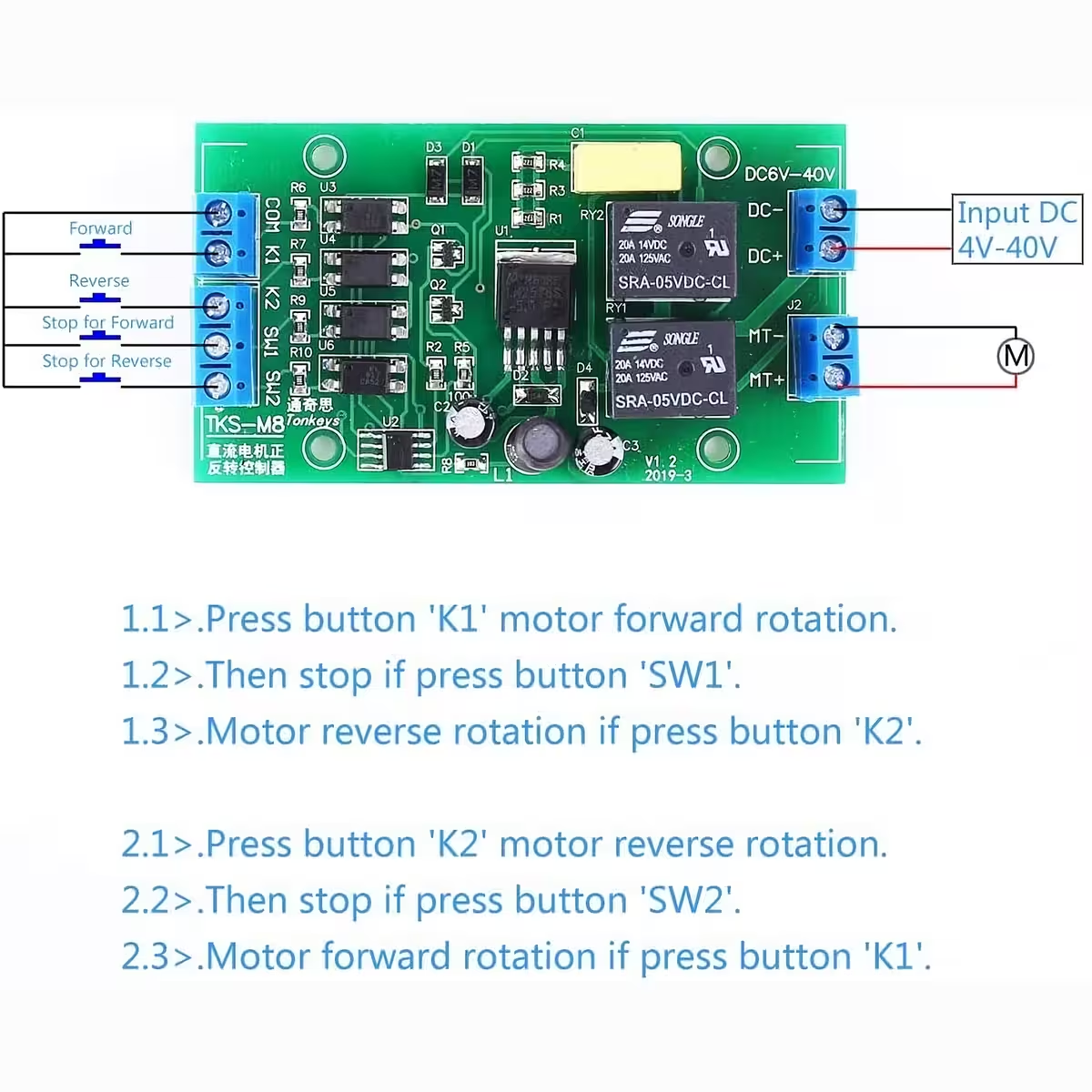
PO-režiim (Isehoidmine): Lühike impulss K1 või K2 sisendil käivitab mootori. Mootor töötab iseseisvalt edasi, kuni aktiveerub vastav piirlüliti või antakse vastassuunaline käsk. Ideaalne automatiseerimiseks.
P1-režiim (Jog): Mootor töötab ainult seni, kuni K1 või K2 sisend on aktiivne. Ideaalne täppisseadistusteks ja manuaalseks positsioneerimiseks.
- Ühenda toiteallikas VIN+ ja VIN– klemmidega (jälgi polaarsust).
- Ühenda DC-mootor Motor+ ja Motor– klemmidega.
- Vali töörežiim: PO isehoidmiseks või P1 jog-režiimiks.
- Ühenda nupud või juhtsignaalid K1 (edasi) ja K2 (tagasi) sisenditesse — need on active-low sisendid.
- Ühenda soovi korral mehaanilised piirlülitid või NPN-NO andurid SW1 ja SW2 klemmidega.
- Automaatse tsüklilise liikumise (A→B→A) jaoks: ühenda asendi A NO-lüliti K1-ga ja asendi B NO-lüliti K2-ga, jättes SW1/SW2 ühendamata.
- Arduino integreerimiseks: ühenda Arduino GND kontrolleri GND-ga, edasikäigu digitaalviik K1-ga ja tagasikäigu viik K2-ga. Seadista viigud OUTPUT-režiimi ja kasuta LOW-signaali aktiveerimiseks.
- Kontrolli mootori käivitusvoolu ja paigalda toiteliinile sobiva suurusega kaitse.
Komplekti sisu
- 1 × DC-mootori suunajuhtimise kontroller (Forward / Reverse), PO/P1 režiimid
Korduma kippuvad küsimused
Mida tähendab active-low ja miks see oluline on?
Sisend aktiveerub, kui pinge langeb alla 2V ehk kui see ühendatakse maandusega (GND). Tavalised nupud, NO-piirlülitid ja NPN-andurid töötavad täpselt nii. Sa ei vaja lisatakisteid ega täiendavat loogikat.
Mis vahe on PO ja P1 režiimil?
PO-režiimis käivitab lühike impulss mootori ja see töötab iseseisvalt kuni piirlülitini või vastassuunalise käsuni — mugav automatiseerimiseks. P1-režiimis töötab mootor vaid seni, kuni hoiad nuppu all — ideaalne täpseks positsioneerimiseks.
Kas kontrollerit saab ühendada otse Arduinoga?
Jah. Ühenda Arduino GND kontrolleri GND-ga ja kasuta kahte digitaalviiku, mis on seadistatud OUTPUT-režiimi. Kui viik on LOW-olekus, on käsk aktiivne. Arduino tegeleb loogikaga, kontroller võimsusega — lisakomponente pole vaja.
Kas tohib kasutada NC (normal-closed) piirlüliteid?
Kontroller on optimeeritud NO (normal-open) lülititele. NC-kontaktid pööravad loogika vastupidiseks ja võivad põhjustada soovimatut käitumist. Kasuta SW1 ja SW2 jaoks alati NO-kontakte.
Kas maksimaalse voolu juures on vaja jahutust?
20A lähedaste voolutugevuste või intensiivse tsüklilise töö korral taga piisav ventilatsioon ja jälgi mooduli temperatuuri. Pideva suure koormuse korral võib väike jahutusradiaator või sundventilatsioon märgatavalt pikendada seadme eluiga.
Kuidas luua automaatset tsüklilist liikumist ilma taimerita?
Ühenda asendi A NO-lüliti K1-ga ja asendi B NO-lüliti K2-ga, jättes SW1 ja SW2 ühendamata. Kui mootor jõuab lõppasendisse, aktiveerib lüliti automaatselt vastassuunalise liikumise — mootor hakkab pidevalt edasi-tagasi liikuma ilma välise sekkumiseta.
Tutvustav video
Galerii











Arvustused
Tooteülevaateid veel ei ole.